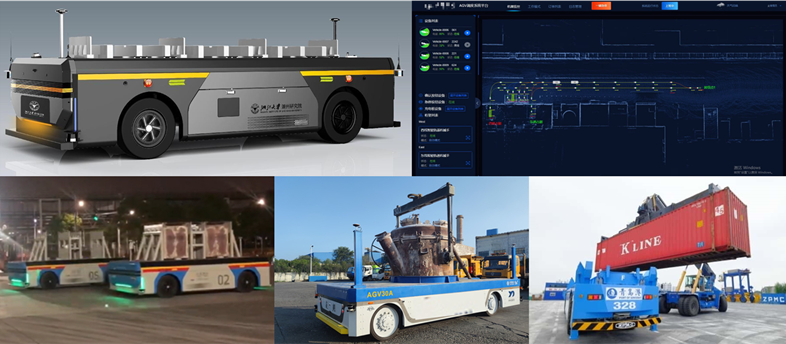
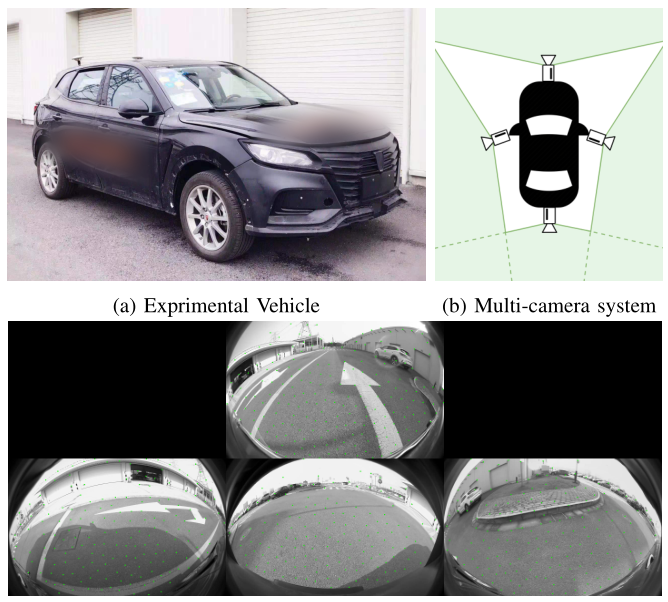
智能重载运输车,采用先进的基于3D激光雷达、视觉传感器、GPS和IMU等多传感器融合的SLAM和定位导航技术,具有大范围环境三维地图构建、无DGPS下实时准确定位、人车混杂环境下安全自主导航等功能。可结合用户需求完成自动转运工作。
开放道路环境1-3级无人驾驶、园区级环境3-4级无人驾驶、额定负载能力 10-30T、外形尺寸 长5000*宽2000、前后双桥转向,无掉头运行
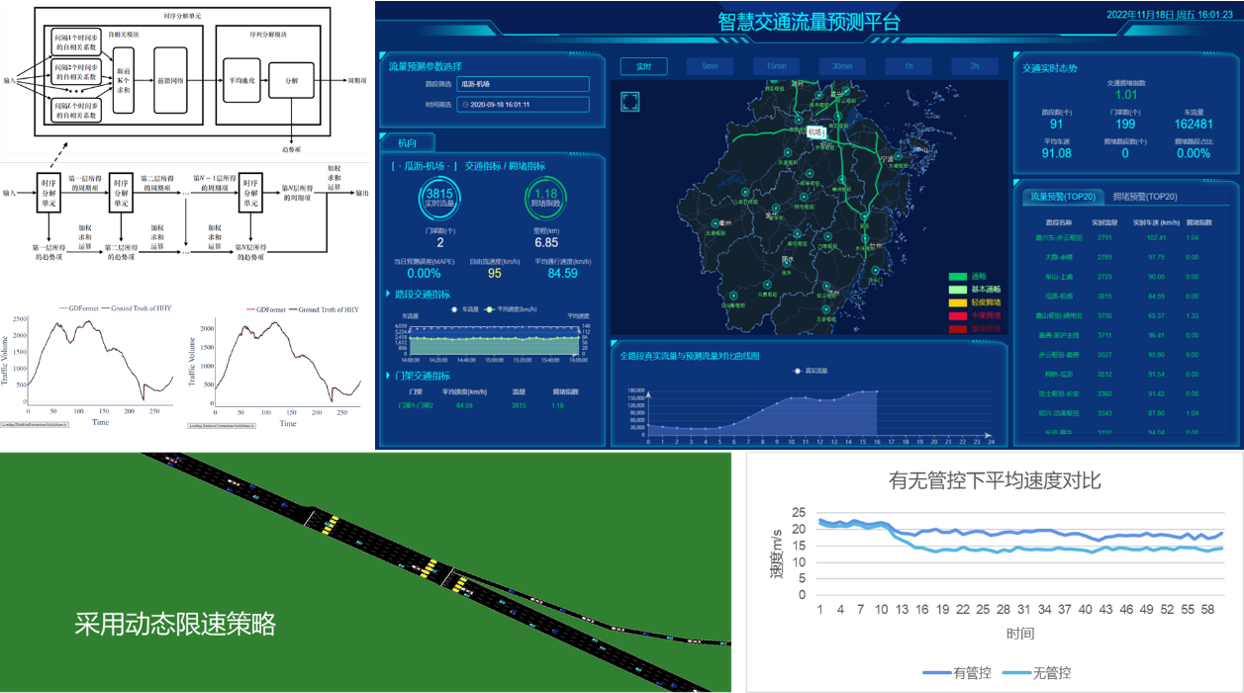
高速公路混合交通流预测控制,利用大数据平台上完成多源、多粒度、多模态的智能数据融合算法的研究与应用,实现区域路网规律的流量、速度等交通流信息融合结果。
基于高速公路交通流智能融合结果,设计交通流预测算法团簇,对区域路网内全时空交通流实现五分钟至一小时的多粒度精确预测。
基于交通流多粒度精确预测结果,设计合适的控制算法,实现高速公路主线多段智能动态限速指令生成,以及区域路网速度和谐。
成果:专利3篇/论文2篇/软著1篇/浙高运示范应用
车辆轮廓扫测系统,通过连续时间点云运动补偿技术、目标检测跟踪技术实现多车道多车辆实时轮廓扫测。可基于一段连续轨迹进行厘米级目标还原,最大程度还原车辆实际尺寸;最高支持144km/h的行车速度,兼容国内各高速车道;适用于市面上绝大部分具有时间戳的激光雷达;快速部署,单人快速安装与标定。

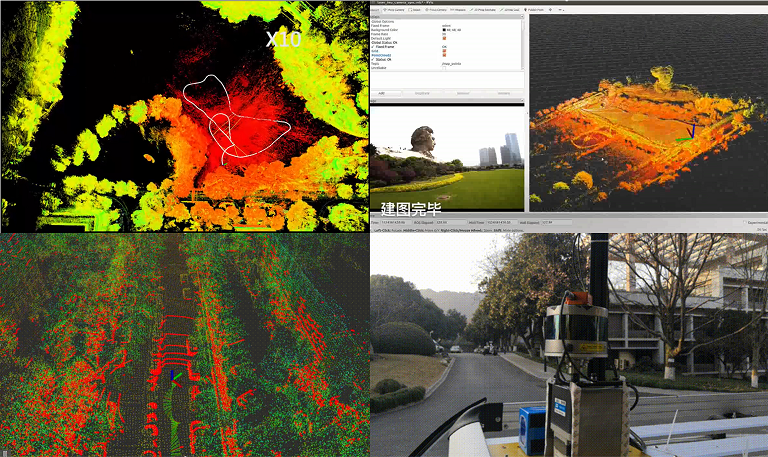
基于激光IMU融合孪生场景快速构建
基于雷视融合的交通车辆目标跟踪与轨迹分析,基于单点位相机监控,识别车辆所在车道、车辆属性(车型、颜色等)、车辆计数。基于双点位雷达+相机监控,车辆跟踪(Reid),雷达目标在接续区域的丢失重识别,以及历史轨迹显示。
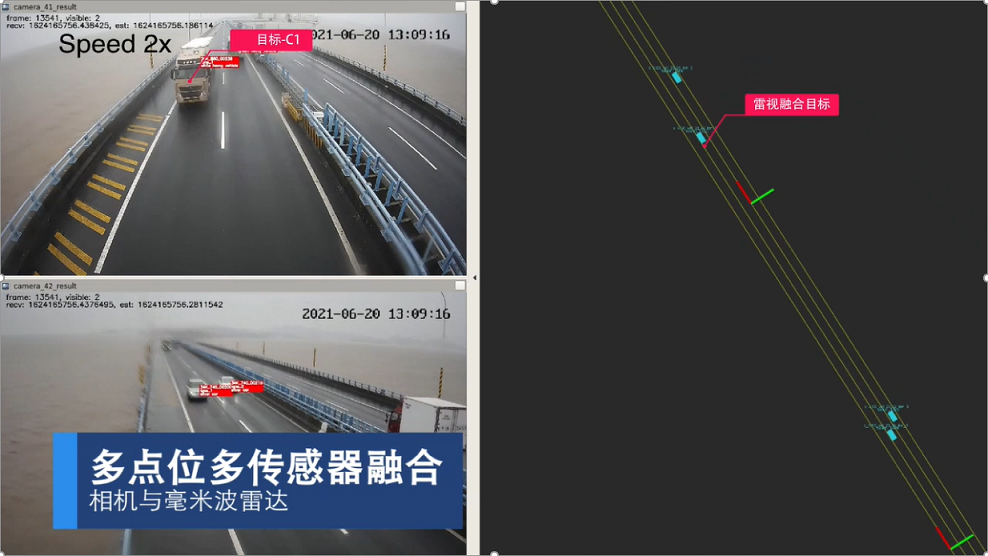
基于相机的交通车辆目标跟踪与轨迹分析,多个观测模组的数据经过汇总与融合,得到某一车辆自进入观测模组探测范围后的全程连续轨迹信息。处理延迟:- 2路4K视频输入,延迟26-35ms;性能指标:- 检测:92.82%,- 多目标跟踪:86.60%,- 跨点位ReID:85.41%。
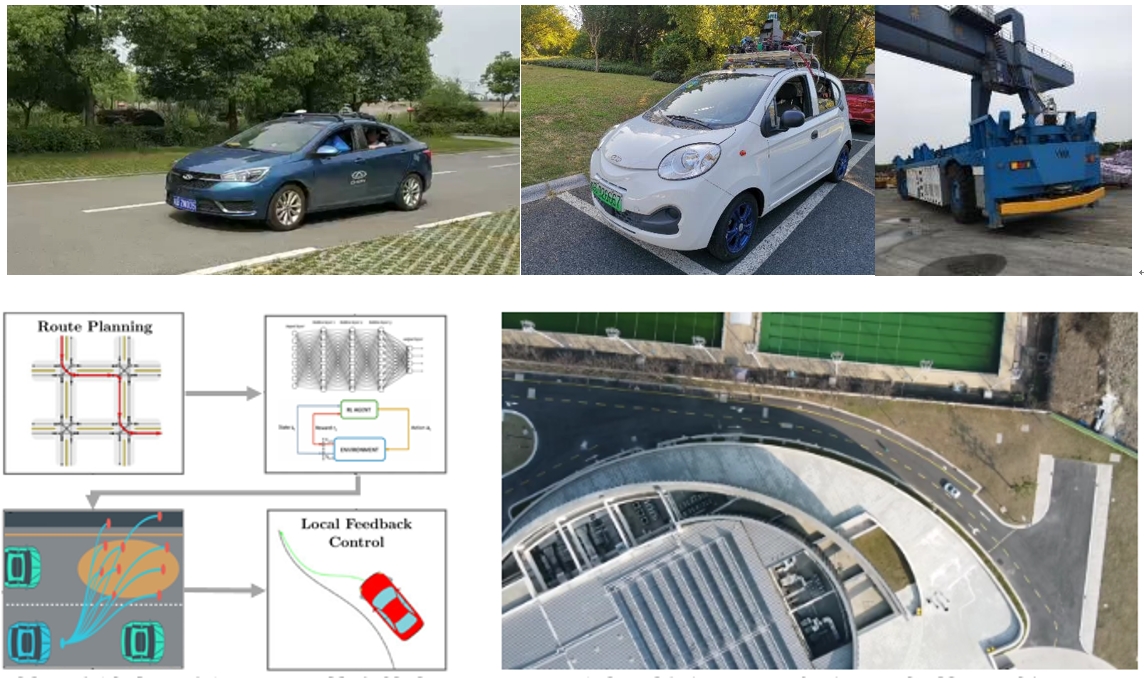
在核心技术研发及小型专用车辆研制方面与奇瑞、京东、中国兵器等企业合作,在地下停车场自主泊车、最后一公里快递配送、重型钢材无人化自主物流、港口集装箱自主搬运等民用和工业场景中开展落地应用。
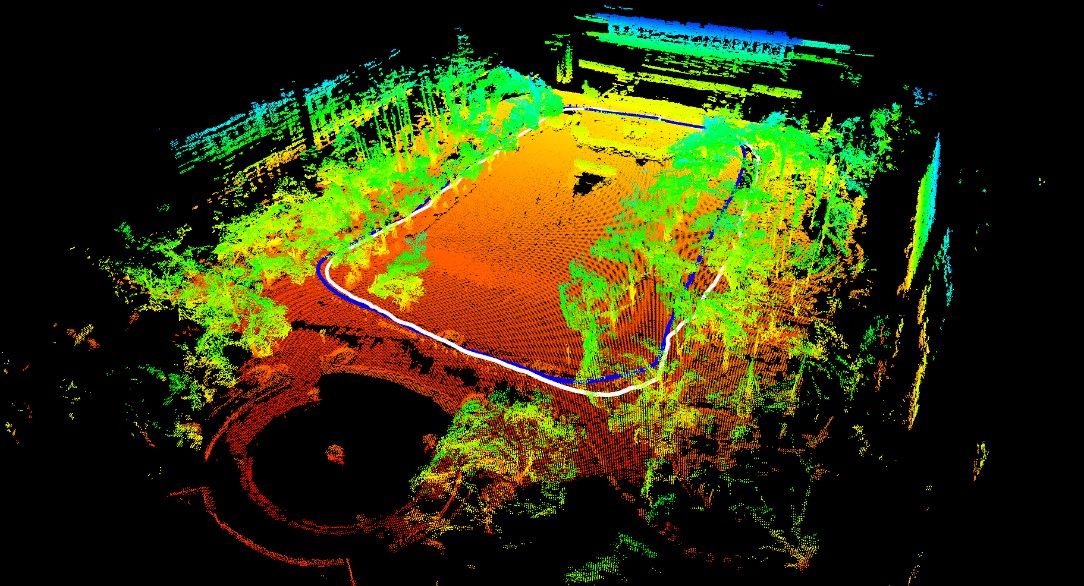
提出了一种基于高斯回归模型的机器人定位与建图方法。该方法采用带参数的函数进行地图表达,代替了栅格化的地图数据。一方面可以对地图进行重采样,获得不同分辨率的地图数据,另一方面提升了定位与建图的精度与效率。该成果发表于国际刊物Autonomous Robots.
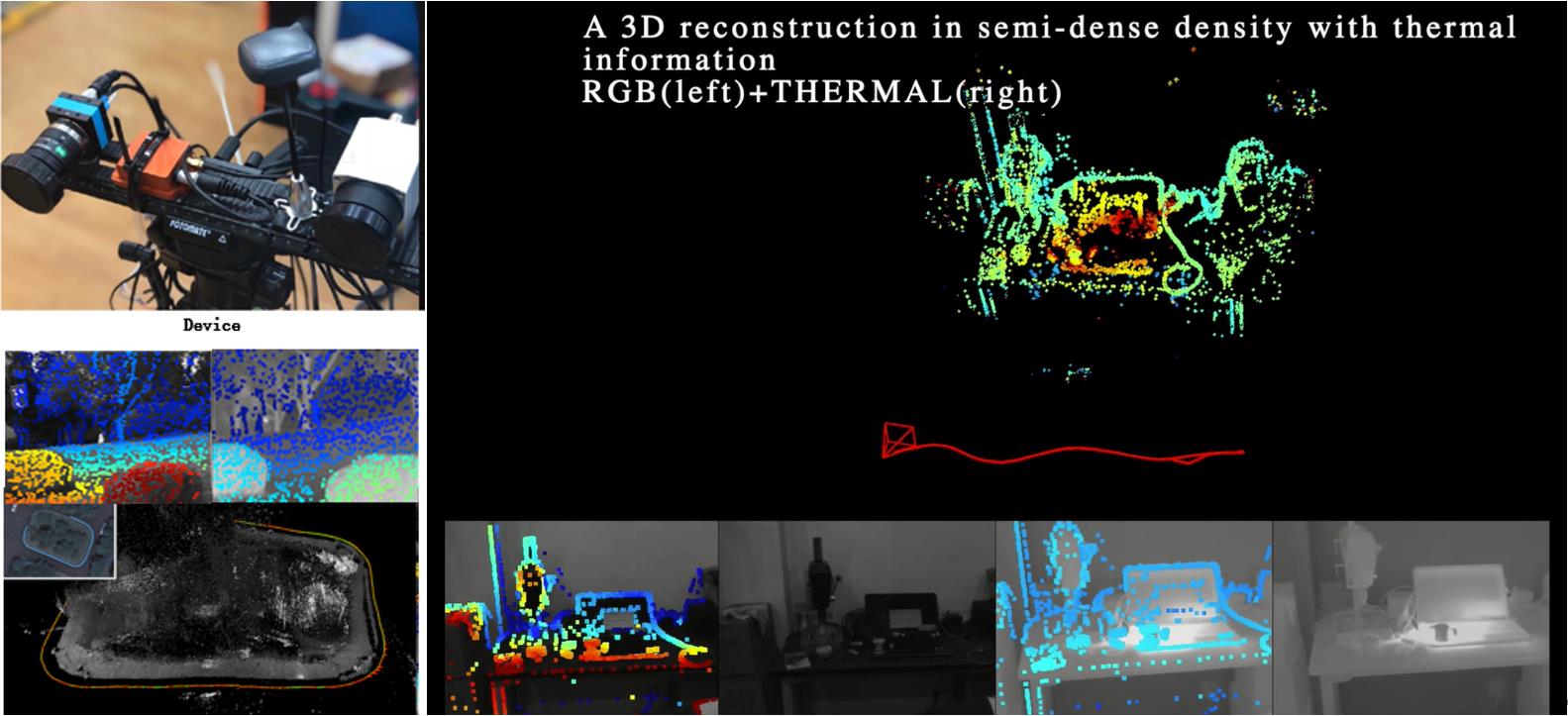
提出了一种基于可见光与热成像融合的机器人定位与建图算法,解决了不同类型传感器的数据融合问题,保证系统在光照变化剧烈的条件下仍然能够稳定运行,同时提高了系统的定位精度。该技术申请国家发明专利1项,并发表于3DV国际会议。
研制了路上、路下环境中的多种车辆无人驾驶全套控制系统,统涵盖多种多个传感器的同步和标定(激光、视觉、IMU、GPS等)、大范围高精地图构建、长期变化环境鲁棒定位、车辆/行人/车道/红绿灯等交通场景理解、车道级行为决策的强化学习以及底盘高精跟踪对接控制等。
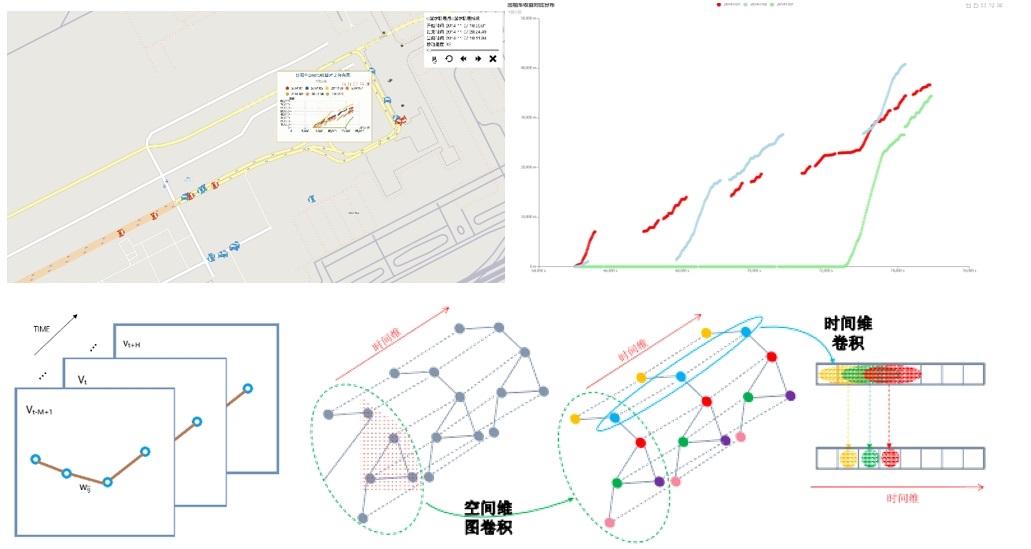
针对高速公路小时交通量预测的问题,结合图卷积和标准卷积构造时空卷积块来同时捕获交通数据的时空特性,更精确地对交通流量进行预测。提出了出租车等待价值最大化模型,为到达机场的出租车提供等待指导决策,辅助机场公共交通优化服务调度。

城市异常检测人流交通预测,基于定位数据交通热点区域预测,运动轨迹回溯,重点区域人流出入预警等。基于定位数据构造了迁徙特征数据,采用无监督学习算法和多粒度信息融合方法来发现功能区域,如工作、购物、娱乐等,对基于活动的行为特征发现功能区提供了重要信息。