一、中心简介
浙江大学控制学院智能驾驶与未来交通研究中心是2019年底正式组建的跨学科研究机构。中心综合了自动化、车辆工程、计算机、交通设计、心理学等多个学科师资队伍,聚焦于应用导向的智能驾驶与未来交通技术研究。
研究中聚焦于智能驾驶与未来交通中的五个主要研究方向:
- 汽车自动驾驶与智能辅助驾驶技术;
- 车路协同与路侧智能化技术及装备;
- 大数据与智能驱动的智能交通信息化系统;
- 车辆系统与车路协同系统安全;
- 智能驾驶与未来交通系统标准与协议。
研究中心在成立之初就建立了广泛的国际合作研究网络,合作方包括瑞士苏黎世理工,美国亚特兰大州立大学,加拿大阿尔伯特大学等机构。同时拥有大量深入合作的企业合作伙伴,包括上汽集团、吉利汽车、奇瑞汽车、阿里巴巴AI实验室、华为自动驾驶、青岛港、上海振华重工集团、银江、中控等。
二、中心已有工作介绍
(1)面向自主停车(AVP)系统的环视相机惯导里程计和SLAM系统,可实现停车场等复杂环境的长距离(2KM)准确车辆位姿估计。

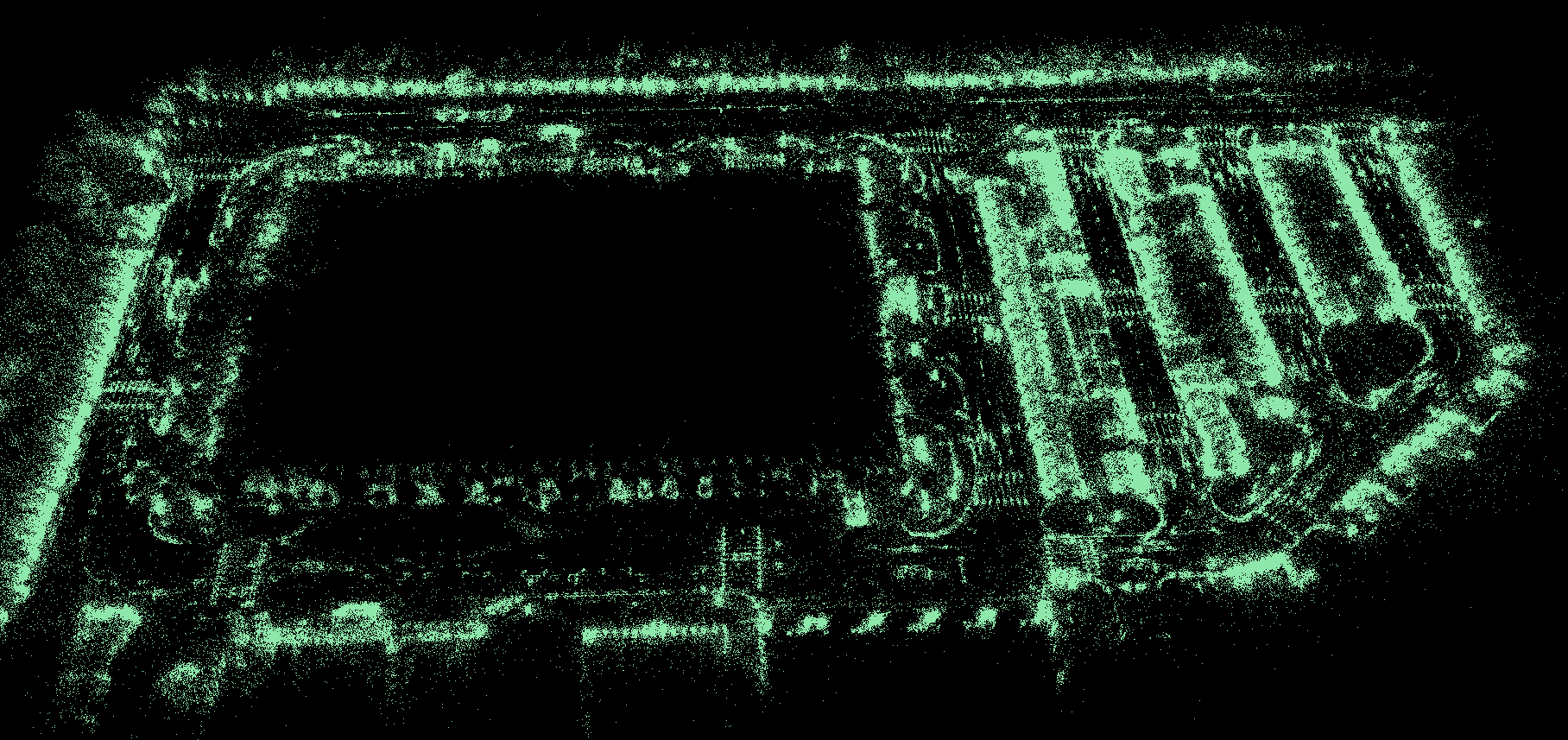
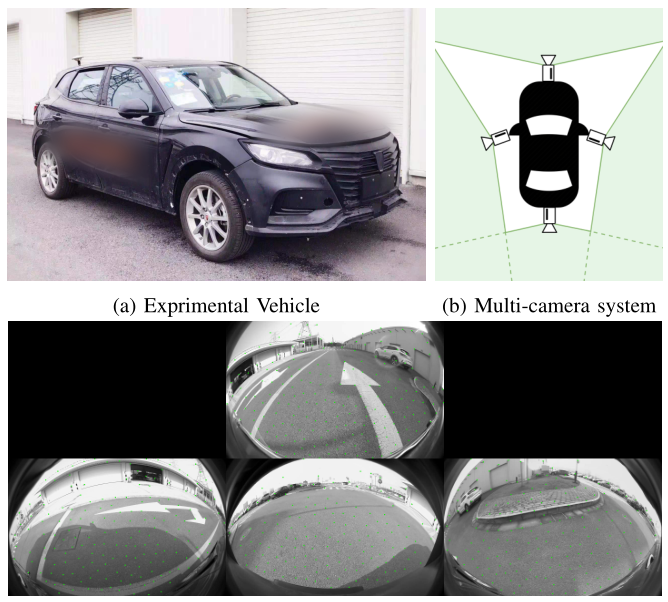
图2 AVP系统使用的传感器示意图
(2)交通路口监控视频流实时分析,通过卡口相机识别监控视频中车辆信息获得车辆速度、估计、车牌等结构化信息,实现城市级的智能交通调度。(相关技术获得全国竞赛第三名)


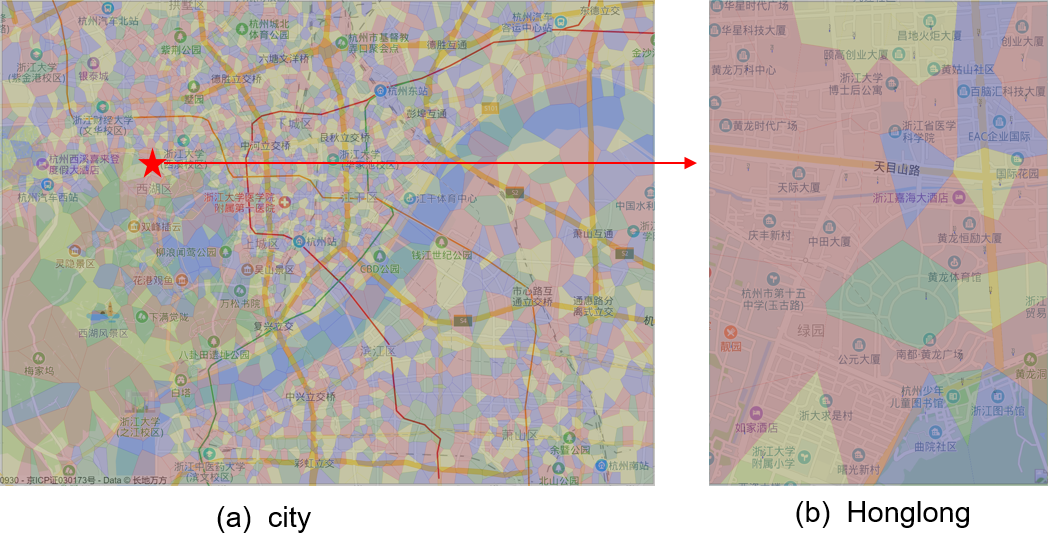
(3)城市异常检测人流交通预测及可视化交互系统,基于定位数据交通热点区域预测,运动轨迹回溯,重点区域人流出入预警等。基于定位数据构造了迁徙特征数据,采用无监督学习算法和多粒度信息融合方法来发现功能区域,如工作、购物、娱乐等,对基于活动的行为特征发现功能区提供了重要信息。

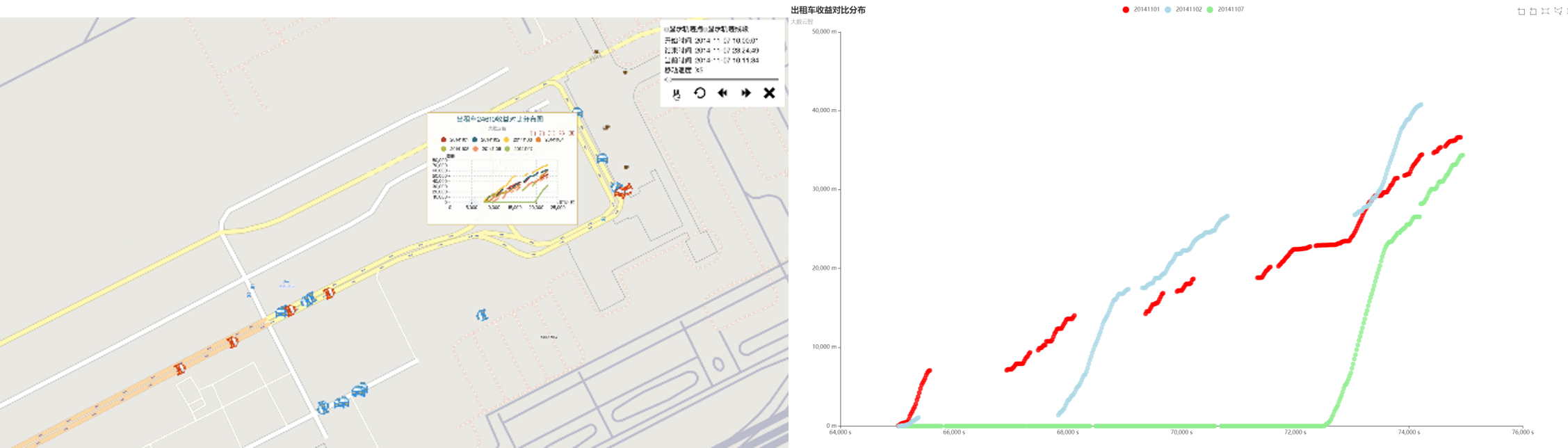
(4)设计了出租车等待价值最大化模型,为到达机场的出租车提供等待指导决策,辅助机场公共交通优化服务调度。在杭州市资源局主办的全球数据资源开发者大赛中获得优胜奖。